|
|
|
|
|
|
|
|
|
|
Voilà un sujet qui au départ peut être simple mais qui présente certaines difficultés qui cumulées entre elles peuvent rendre cette affaire inextricable. (je parle par expérience). Je n’aborderais ici que le guidage avec un instrument en parallèle sur le premier et avec un deuxième capteur de guidage le tout sur une monture équatoriale type allemande. Dans mon cas, la caméra CCD est une Starlight Xpress SXV-H9 équipé d’un petit capteur d’autoguidage issus de la Starlight Xpress MX5. C’est un capteur 8 bits non refroidi, d’une dimension de X x X avec des pixels de 9.8 mm en X et 12.6 mm en Y. Il se présente au coulant 31.75 mm ce qui limite son poids.
|
||
Il y a parallèle et parallèle !! Parallèle côte à côte ou parallèle l’un au dessus de l’autre. Les 2 formules ont leurs avantages et leurs inconvénients. Le principal dans les 2 cas, c’est la répartition des poids. En côte à côte le bras de levier est moins important côté instrument, mais la différence des masses entre les 2 instruments peut déséquilibrer la monture dans certaines positions. En parallèle l’un sur l’autre, le bras de levier est plus important et il faudra plus de contrepoids. On aura intérêt à rapprocher autant que possible les 2 instruments.
|
||
|
||
Avec quelle focale est-ce que je dois guider ? Je vous préviens tout de suite, je n’ai pas la réponse !! J’apporte juste quelques réflexions et vous fait part de mon expérience ! Pour ce point, on trouve presque toutes les configurations possibles !!! La première règle c’est que l’on guide avec ce que l’on a !! Bien souvent la lunette de guidage est une lunette bon marché, voir un premier instrument, ou un instrument complémentaire de l’instrument principal. Moi j’utilise une Orion 80 ED que j’ai acheté en complément de mon C8. Très vite, j’ai vu l’intérêt de mettre les 2 instruments en parallèle, non seulement pour faire du guidage de l’un avec l’autre, mais aussi pour faire de l’imagerie « grand champ ». Comment déterminer la bonne focale de guidage ? En fait il faut comparer ce qui est comparable. Et c’est l’échantillonnage des 2 formules optiques qu’il faut comparer. La SXV-H9 à des pixels carrés de 6.45 mm, montée derrière un C8 à 2 m de focale on obtient un échantillonnage de E=206*6.45/2000 = 0.66 arcsec par pixel Pour la lunette de guidage en X, l’échantillonnage est de E=206*9.8/600 = 3.36 arcsec par pixel. On voit bien tout de suite, que lorsque mon étoile de guidage va bouger de 1 pixel sur le capteur de guidage, cela va représenter un déplacement sur le capteur de la CCD derrière le C8 de 3.36/0.66 = 5 pixels !!! Si je monte une Barlow x2 derrière la lunette guide je ramène cette proportion à 2.5 pixels Pour ramener cette proportion à 1 il faudrait que je monte une Barlow x5 sur la lunette de guidage !! Cela deviens problématique de trouver des étoiles guides suffisamment brillantes avec un focale de 3 m et une ouverture de 80 mm !!! Moralité : faite ce que vous pouvez !!!! J’ai utilisé plusieurs configurations : le C8 avec ses 2 m de focale guidé avec la lunette de 600 mm de focale et une barlow x2. Le C8 avec un réducteur de focale 6.3 et la lunette guide avec sa barlow x2 La TEC 140 à 980 mm de focale guidé avec la lunette à 600 mm. |
||
|
|
||
|
||
|
|
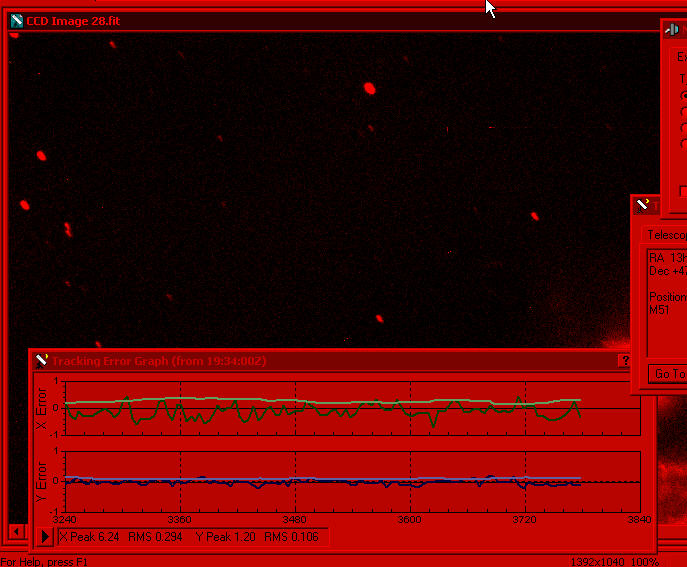
Alors là on s’attaque au nśud du problème. Dés que l’on parle de problème d’autoguidage la réponse passe partout, c’est « problème de flexions » !! En fait par expérience,.......... c’est vrai ! Les 2 systèmes optiques doivent être solidement fixés l’un à l’autre. L’idéal c’est de monter une deuxième queue d’aronde sur le premier instrument et de mettre le deuxième dans des anneaux solides, et très rigides. Si on appuie sur la lunette guide, il ne doit pas y avoir de « flexions » ni de mouvement de l’un par rapport à l’autre. Tous les éléments mobiles sont à proscrire. Par exemple typiquement le flopping du miroir d’un C8 va amener des déplacements des étoiles sur l’image, même avec une excellente courbe de guidage. Avec des poses de 5 min si le guidage est bon les étoiles seront rondes, mais d’une image à l’autre elles se déplaceront. Au bout de 2 ou 4 h de poses votre objet sera décentré par rapport au départ, et pourtant l’étoile guide est toujours sous la croix du capteur d’autoguidage !! Et dans ce cas là, ce n’est pas la peine de tenter de faire des poses plus longues. Autre problème, les accessoires situé à l’arrière des instruments. Flip mirror, focuser se trouvant sur le chemin optique etc… peuvent apporter des parties mobiles qui viendront perturber soit le guidage si les accessoires sont sur la partie guidage, soit déplacer les étoiles si elles sont sur la partie capteur principal. Typiquement si la courbe de guidage est bonne, et que les étoiles sont filées ou se déplacent d’une image à l’autre, c’est que quelque chose bouge quelque part entre le capteur CCD et le tube optique, comme l' exemple ci-dessous . Pour solutionner ce problème, il faut tout enlever et monter les accessoires petit à petit afin de déterminer celui qui pose problème. Si la courbe de guidage est agité, alors, il faut faire pareil mais sur lunette de guidage. Le mieux étant de limiter les accessoires au minimum sur le chemin optique.
Sur la TEC, le fait d’enlever le focuser qui tenait tant bien que mal par l’anneau de fixation TEC, à pratiquement supprimer le déplacement d’étoile que j’avais entre chaque image. Sur la lunette guide pour avoir la MAP, j’avais mis un focuser JMI une bague de réduction au coulant 31.75 et le capteur. J’ai remplacé le tout par la sortie de l’Orion (adaptée aux vis de fixation) le renvoi coudé (pour avoir la MAP) et le capteur MX5
|
|
|
|
|
|
|
A priori la mise en station n’apparaît pas comme un point très important pour l’autoguidage, puisque de toute façon le logiciel de pilotage va apporter des corrections aussi sur l’axe de déclinaison. En fait il n’en est rien. Si la mise en station est excellente, il y aura très peu de correction appliqué en déclinaison, et on pourrait se passer de guidage sur cet axe. Je vous propose une explication simple et pratique de la méthode de Bigourdan sur cette page et une méthode pour vérifier votre mise en station. |
||
|
|
|
|
On pourrait penser à priori que la monture doit être parfaitement équilibrée. En fait il n’en est rien. Pour améliorer le guidage il faut que la vis sans fin soit en contact permanent avec la roue dentée, quelque soit les corrections apportées en plus ou en moins ! Pour cela il faut que la monture soit légèrement déséquilibrée côté contrepoids.
|
||
|
|
||
|
|
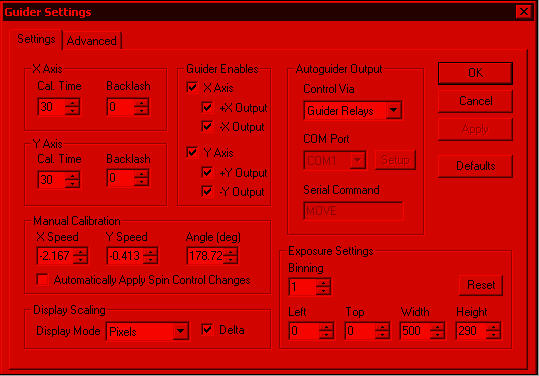
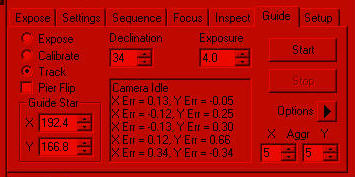
La calibration est la première opération à faire pour l’autoguidage. Pour cela il faut trouver et centrer une étoile guide sur le capteur. L’opération de calibrage va permettre au logiciel de connaître la vitesse de la monture sur les 2 axes et l’orientation du capteur d’autoguidage. Il faut prendre quelques minutes à orienter son capteur selon les axes de la monture, cela facilitera par la suite la compréhension si des problèmes se présentent. Généralement on règle un temps de déplacement sur les 2 axes et le logiciel fait le reste. L’étoile doit revenir à son point de départ. Dans le cas contraire en déclinaison, c’est qu’il y a du backlash dans la monture . Cela peut se régler soit dans l’électronique de la monture soit dans le logiciel de guidage. On peut calculer la vitesse théorique de guidage et la comparer voir l’ajuster avec celle trouver par le logiciel. En connaissant la vitesse de guidage de la monture 0.5 x fois la vitesse sidérale et avec l’échantillonnage calculé précédemment : Vitesse = 15*vitesse de guidage/échantillonnage Par exemple avec un échantillonnage de 3.36 arc sec par pixel et une vitesse de guidage de 0.5, je m’attends à trouver une vitesse de 2.229 pixel/sec. Le logiciel me trouve 2.167 pixel/sec, ce qui n'est pas si mal. Le signe moins est lié à l'orientation de mon capteur de guidage qui est dans ce cas là de 178°
|
|
|
|
|
|
|
|
Logiquement si tous les problèmes mécaniques sont résolus, il n’est pas nécessaire de toucher les paramètres par défaut du logiciel hormis l’agressivness. Néanmoins, je vais essayer de vous donner des explications sur les différents paramètres que l’on peut modifier :
Agressivness : c’est la “puissance” de la correction appliqué par le logiciel. C’est un pourcentage de 0 à 10 (0 à 100 %). Plus le chiffre est grand plus la correction sera importante.
Min Move : C’est le temps minimum d’impulsion d’autoguidage en sec. C’est le plus petit temps utilisé pour corriger un déplacement d’étoile. Si on a 0.1 sec. Le logiciel enverra une impulsion d’au minimum de 0.1 sec sur l’axe considéré. Max Move : C’est le temps maximum d’impulsion d’autoguidage en sec. Pour 2 sec le logiciel enverra une impulsion d’au maximum de 2 sec. X speed : C’est la vitesse de déplacement selon l’axe X. Axe d’Ascension Droite. En pixel par sec Y speed : C’est la vitesse de déplacement selon l’axe Y. Axe de déclinaison. En pixel par sec Use Scope Dec : Permet de tenir compte de la déclinaison du télescope pour le calcul de la vitesse de guidage. Si la calibration a été faite à une déclinaison différente de celle où l’on fait l’image par exemple.
|
|
|
|
|
|
|
|
Le temps de pose et le seeing. Le temps de pose du capteur de guidage doit être suffisamment long pour s’affranchir de la turbulence. Il serait vain d’essayer de suivre une étoile au pixel près si la turbulence fait bouger l’étoile de 3 pixels sur le capteur de guidage. J’utilise typiquement 4 secondes de temps de poses. Cela permet de s’affranchir de la turbulence, et de voir des étoiles plus petites. Si on soustrait un dark, ça améliore le contraste des étoiles sur le fond de ciel. Le choix de l’étoile guide : L’étoile ne doit pas être trop grosse, car pour calculer le centroïde le logiciel a besoin que l’étoile ne soit pas saturée. Guider au pixel près sur une étoile qui fait 10 pixels de diamètre ne sera pas très bon !
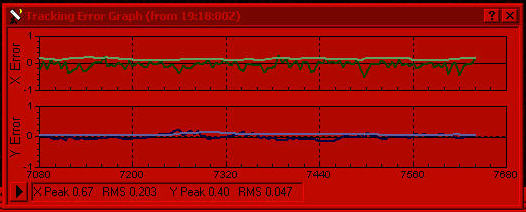
L’enregistrement : Il est toujours intéressant de conserver une trace du guidage. Tous les logiciels proposent cette option. Cela peut permettre de voir où se situe les problèmes. Le logiciel permet d'afficher en temps réel la courbe de guidage, mais aussi d'enregiustrer les données dasn un fichier texte pour une exploitation ultérieure.
Exemple de fichier texte : Track Log Started at UT 2007-04-24 19:35:33 UT Time, Star X, Star Y, OffsetX, OffsetY, Corr X, Corr Y, Bright 19:35:38, 252.20, 211.33, 0.30, 0.03, 0.14, -0.01, 187 19:35:43, 251.92, 211.24, 0.02, -0.06, 0.00, 0.02, 214 19:35:47, 251.72, 211.22, -0.18, -0.08, -0.08, 0.03, 190 19:35:52, 251.95, 211.27, 0.05, -0.03, 0.02, 0.01, 202 19:35:57, 251.73, 211.24, -0.17, -0.06, -0.07, 0.02, 191 19:36:01, 252.07, 211.28, 0.17, -0.02, 0.07, 0.00, 184 19:36:06, 252.10, 210.87, 0.20, -0.43, 0.10, 0.16, 182 19:36:11, 251.94, 211.38, 0.04, 0.08, 0.01, -0.03, 199
|
|
|
|
|
|






 Le Montage en Parallèle
Le Montage en Parallèle